Dynamical susceptibility
Dynamic susceptibility
By applying an alternating magnetic field,
The magnetization due to
where
where
where
julia
using MicroMagnetic
using DelimitedFiles
using CairoMakie
using FFTWEnable GPU acceleration
julia
@using_gpu()
mesh = FDMesh(; nx=200, ny=50, nz=1, dx=2.5e-9, dy=2.5e-9, dz=3e-9);Step 1: Relaxing the System
The first step in our simulation is to relax the system to obtain a stable magnetization configuration, often referred to as an "S" state. We encapsulate this process in the relax_system function.
julia
function relax_system(mesh)
sim = Sim(mesh; driver="SD", name="std4_bar")
Ms = 8e5
A = 1.3e-11
set_Ms(sim, Ms) # Set saturation magnetization
add_exch(sim, A) # Add exchange interaction
add_demag(sim) # Add demagnetization
init_m0(sim, (1, 0.25, 0.1)) # Initialize magnetization
relax(sim; stopping_dmdt=0.001) # Relax the system
return sim
end
sim = relax_system(mesh);
plot_m(sim; component='x')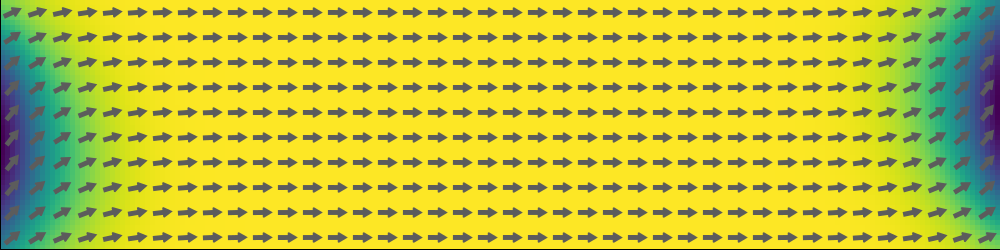
Step 2: Applying external field
julia
function time_fun(t)
w = 2*pi*2.0e9
return sinc(w*t)
end
function run_dynamics(sim)
set_driver(sim; driver="LLG", alpha=0.015, gamma=2.211e5)
sim.driver.tol = 1e-8
add_zeeman(sim, (0, 500, 0), time_fun, name="zee") # Apply external magnetic field in the y-direction
run_sim(sim; steps=10000, dt=1e-12, save_m_every=-1) # Run the simulation for 10000 steps
end
function compute_chi(Ms=8e5)
data, units = read_table("std4_bar_llg.txt")
time = data["time"]
dt = time[2] - time[1]
N = length(time)
println(dt)
freq = fftshift(fftfreq(N, 1/dt))
M = data["m_y"]
H = data["zee_Hy"]
fH = fftshift(fft(H))
fM = fftshift(fft(M .- M[1]))
a = real(fH)
b = imag(fH)
c = real(fM)
d = imag(fM)
rx = (a .* c .+ b .* d) ./ (a .* a .+ b .* b)
ix = (b .* c .- a .* d) ./ (a .* a .+ b .* b)
return freq*1e-9, rx*Ms, ix*Ms
end
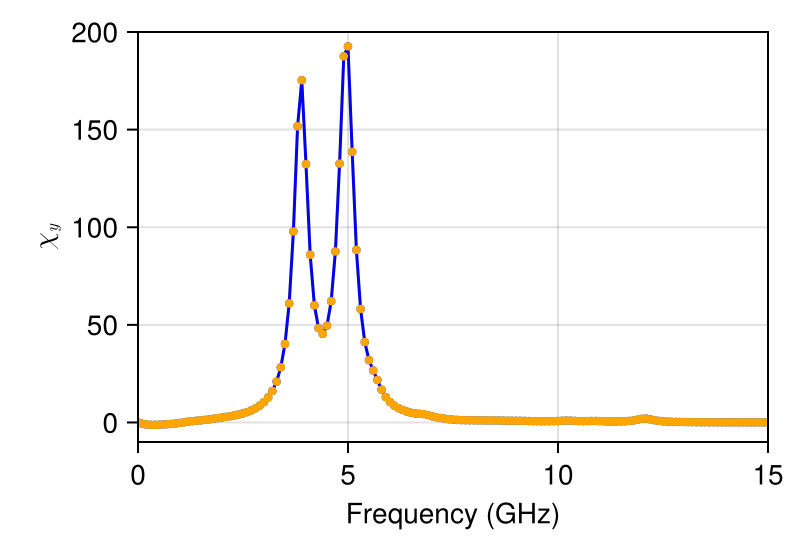
function plot_chi()
data = readdlm("assets/chi.txt")
freq = data[:, 1]
ix = data[:, 3]
fig = Figure(; size=(400, 280), backgroundcolor=:transparent)
ax = Axis(fig[1, 1]; xlabel="Frequency (GHz)", ylabel=L"\chi_y", backgroundcolor=:transparent)
scatterlines!(ax, freq, ix; markersize=6, color=:blue, markercolor=:orange)
xlims!(ax, 0, 15)
ylims!(ax, -10, 200)
return fig
end
if !isfile("assets/chi.txt")
run_dynamics(sim)
freq, rx, ix = compute_chi()
s = div(length(freq), 2)
data = [freq[s:end] rx[s:end] ix[s:end]]
writedlm("assets/chi.txt", data)
end
fig = plot_chi()